ゲームプログラミング技術集
ひっと
点と三角形の当たり判定( 内外判定 )
外積を使った三角形の内外判定法とプログラミング例。
点と三角形の内外判定法
同一平面上にある三角形と点について、
三角形の内側に点があるかどうかは、外積を使って調べることができます。
三角形の内側に点があるとき、外積によるベクトルは3つとも同じ方を向きます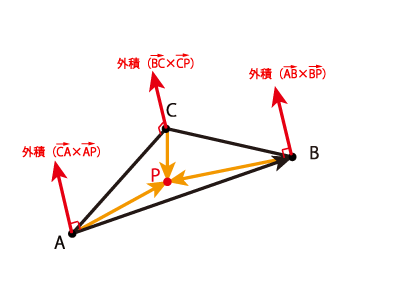
三角形の外側に点があるとき、外積ベクトルの向きは揃いません
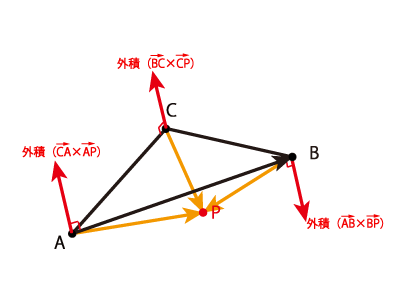
この性質を利用して、3つの外積ベクトルの向きを比較すると、三角形の内外判定ができます。
三角形の内側に点があるかどうかは、外積を使って調べることができます。
三角形の内側に点があるとき、外積によるベクトルは3つとも同じ方を向きます
三角形の外側に点があるとき、外積ベクトルの向きは揃いません
この性質を利用して、3つの外積ベクトルの向きを比較すると、三角形の内外判定ができます。
点と三角形の内外判定法 プログラミング例
点と三角形の当たり判定を行うプログラムです。2D用3D用ありますが考え方は同じです。
3つの外積ベクトルを求め、Z成分を比較してベクトル方向が同じか判定します。
3Dの場合は三角形と点が同一平面上にあることが前提です。同一平面上にないと正しく動作しません。
3つの外積ベクトルを求め、内積を使ってベクトル方向が同じか判定します。
点と三角形の内外判定 2Dの場合
3Dの場合はこちら...3つの外積ベクトルを求め、Z成分を比較してベクトル方向が同じか判定します。
#include <math.h>
struct Vector2D{
double x;
double y;
};
//頂点の定義(ベクトルと同じ)
#define Vertex2D Vector2D
//ベクトル引き算(a-b)
Vector2D sub_vector( const Vector2D& a, const Vector2D& b )
{
Vector2D ret;
ret.x = a.x - b.x;
ret.y = a.y - b.y;
return ret;
}
// 三角形と点の当たり判定(2Dの場合)
// 戻り値 0:三角形の内側に点がある 1:三角形の外側に点がある
int hittest_point_polygon_2d( Vertex2D A, Vertex2D B, Vertex2D C, Vertex2D P ) {
//線上は外とみなします。
//ABCが三角形かどうかのチェックは省略...
Vector2D AB = sub_vector(B, A);
Vector2D BP = sub_vector(P, B);
Vector2D BC = sub_vector(C, B);
Vector2D CP = sub_vector(P, C);
Vector2D CA = sub_vector(A, C);
Vector2D AP = sub_vector(P, A);
//外積 Z成分だけ計算すればよいです
double c1 = AB.x * BP.y - AB.y * BP.x;
double c2 = BC.x * CP.y - BC.y * CP.x;
double c3 = CA.x * AP.y - CA.y * AP.x;
if( ( c1 > 0 && c2 > 0 && c3 > 0 ) || ( c1 < 0 && c2 < 0 && c3 < 0 ) ) {
//三角形の内側に点がある
return 0;
}
//三角形の外側に点がある
return 1;
}
点と三角形の内外判定 3Dの場合
2Dの場合はこちら...3Dの場合は三角形と点が同一平面上にあることが前提です。同一平面上にないと正しく動作しません。
3つの外積ベクトルを求め、内積を使ってベクトル方向が同じか判定します。
#include <math.h>
//ベクトルの定義と各種計算
struct Vector3D{
double x;
double y;
double z;
};
//頂点の定義(ベクトルと同じ)
#define Vertex3D Vector3D
//ベクトル引き算(a-b)
Vector3D sub_vector( const Vector3D& a, const Vector3D& b )
{
Vector3D ret;
ret.x = a.x - b.x;
ret.y = a.y - b.y;
ret.z = a.z - b.z;
return ret;
}
//ベクトル外積( vl × vr )
Vector3D cross_product( const Vector3D& vl, const Vector3D& vr )
{
Vector3D ret;
ret.x = vl.y * vr.z - vl.z * vr.y;
ret.y = vl.z * vr.x - vl.x * vr.z;
ret.z = vl.x * vr.y - vl.y * vr.x;
return ret;
}
//ベクトル内積
double dot_product( const Vector3D& vl, const Vector3D vr) {
return vl.x * vr.x + vl.y * vr.y + vl.z * vr.z;
}
// 三角形と点の当たり判定(3Dの場合)
// 戻り値 0:三角形の内側に点がある 1:三角形の外側に点がある
int hittest_point_polygon_3d( Vertex3D A, Vertex3D B, Vertex3D C, Vertex3D P ) {
//点と三角形は同一平面上にあるものとしています。同一平面上に無い場合は正しい結果になりません
//線上は外とみなします。
//ABCが三角形かどうかのチェックは省略...
Vector3D AB = sub_vector(B, A);
Vector3D BP = sub_vector(P, B);
Vector3D BC = sub_vector(C, B);
Vector3D CP = sub_vector(P, C);
Vector3D CA = sub_vector(A, C);
Vector3D AP = sub_vector(P, A);
Vector3D c1 = cross_product( AB, BP );
Vector3D c2 = cross_product( BC, CP );
Vector3D c3 = cross_product( CA, AP );
//内積で順方向か逆方向か調べる
double dot_12 = dot_product(c1, c2);
double dot_13 = dot_product(c1, c3);
if( dot_12 > 0 && dot_13 > 0 ) {
//三角形の内側に点がある
return 0;
}
//三角形の外側に点がある
return 1;
}
ゲームプログラミングの数学
ゲームプログラミング
技術集INDEX
Direct3Dグラフィック
Direct3Dを使った2D描画
テキスト描画
プログラムとソースコード
頂点シェーダ実装例
HLSLでシェーダプログラミング
HLSL エフェクトファイルの作成
HLSL アプリケーション側の実装
テキスト描画
Xファイル
Xファイルの読み込みと表示
カメラ制御
ビューとプロジェクションプログラムとソースコード
シェーダプログラミング
ピクセルシェーダ実装例頂点シェーダ実装例
HLSLでシェーダプログラミング
HLSL エフェクトファイルの作成
HLSL アプリケーション側の実装
入力 DirectInput
サウンド DirectShow
ゲームプログラミングの数学
ベクトル
単位ベクトル
ベクトルの外積
ベクトルの内積
2ベクトルのなす角度
2点間の距離
点と線の距離
点と三角形の当たり判定
線上の最近点
2直線の交点
ポリゴンから法線を作る
ポリゴンの表裏の判定
平面と平面方程式の求め方
点と平面の距離
平面上の最近点
平面と線分の交点
単位ベクトル
ベクトルの外積
ベクトルの内積
2ベクトルのなす角度
2点間の距離
点と線の距離
点と三角形の当たり判定
線上の最近点
2直線の交点
ポリゴンから法線を作る
ポリゴンの表裏の判定
平面と平面方程式の求め方
点と平面の距離
平面上の最近点
平面と線分の交点
弾道計算プログラミング
アルゴリズム