ゲームプログラミング技術集
ひっと
線上の最近点を求める
線上の最近点を求める方法とプログラミング例を紹介
線上の最近点を求める(2次元 3次元)
ABを通る線に点Pから垂線をおろし、その交点Xを求めるには...
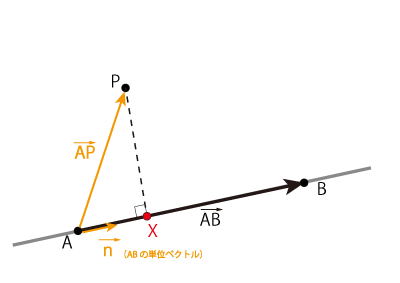
ABの単位ベクトルnと、ベクトルAPを内積します。
内積の結果から点Aと点Xの距離が分かります。
ABの単位ベクトルnと、ベクトルAPを内積します。
内積の結果から点Aと点Xの距離が分かります。
AXの距離 = ABの単位ベクトル ・ ベクトルAP
ABの単位ベクトルとAXの距離から、点Xの位置が計算できます。(※ベクトルABの後方に点Xがあると、AXの距離はマイナスの数値になります。そのまま計算に使ってください)
点X = 点A + (ABの単位ベクトル * AXの距離)
線上の最近点 プログラミング例 (2次元)
3次元のプログラミング例へ
#include <math.h>
//頂点の定義
struct Vertex2D{
double x;
double y;
};
//ベクトルの定義(頂点と同じ)
#define Vector2D Vertex2D
//単位ベクトル生成
Vector2D ceate_unit_vector( Vector2D v )
{
double len = pow( ( v.x * v.x ) + ( v.y * v.y ), 0.5 );//ベクトル長さ
Vector2D ret;
ret.x = v.x / len;
ret.y = v.y / len;
return ret;
}
//ベクトル内積
double dot_product(Vector2D vl, Vector2D vr) {
return vl.x * vr.x + vl.y * vr.y;
}
//点Pと直線ABから線上最近点を求める
Vector2D NearPosOnLine(Vertex2D P, Vertex2D A, Vertex2D B )
{
Vector2D AB,AP;//ベクトルAB AP
AB.x = B.x - A.x;
AB.y = B.y - A.y;
AP.x = P.x - A.x;
AP.y = P.y - A.y;
//ABの単位ベクトルを計算
Vector2D nAB = ceate_unit_vector(AB);
//Aから線上最近点までの距離(ABベクトルの後ろにあるときはマイナス値)
double dist_AX = dot_product( nAB, AP );
//線上最近点
Vector2D ret;
ret.x = A.x + ( nAB.x * dist_AX );
ret.y = A.y + ( nAB.y * dist_AX );
return ret;
}
線上の最近点 プログラミング例 (3次元)
2次元のプログラミング例へ
#include <math.h>
//頂点の定義
struct Vertex3D{
double x;
double y;
double z;
};
//ベクトルの定義(頂点と同じ)
#define Vector3D Vertex3D
//単位ベクトル生成
Vector3D ceate_unit_vector( Vector3D v )
{
double len = pow( ( v.x * v.x ) + ( v.y * v.y ) + ( v.z * v.z ), 0.5 ); //ベクトル長さ
Vector3D ret;
ret.x = v.x / len;
ret.y = v.y / len;
ret.z = v.z / len;
return ret;
}
//ベクトル内積
double dot_product(Vector3D vl, Vector3D vr) {
return vl.x * vr.x + vl.y * vr.y + vl.z * vr.z;
}
//点Pと直線ABから線上最近点を求める
Vector3D NearPosOnLine(Vertex3D P, Vertex3D A, Vertex3D B )
{
Vector3D AB,AP;//ベクトルAB AP
AB.x = B.x - A.x;
AB.y = B.y - A.y;
AB.z = B.z - A.z;
AP.x = P.x - A.x;
AP.y = P.y - A.y;
AP.z = P.z - A.z;
//ABの単位ベクトルを計算
Vector3D nAB = ceate_unit_vector(AB);
//Aから線上最近点までの距離(ABベクトルの後ろにあるときはマイナス値)
double dist_AX = dot_product( nAB, AP );
//線上最近点
Vector3D ret;
ret.x = A.x + ( nAB.x * dist_AX );
ret.y = A.y + ( nAB.y * dist_AX );
ret.z = A.z + ( nAB.z * dist_AX );
return ret;
}
ゲームプログラミングの数学
ゲームプログラミング
技術集INDEX
Direct3Dグラフィック
Direct3Dを使った2D描画
テキスト描画
プログラムとソースコード
頂点シェーダ実装例
HLSLでシェーダプログラミング
HLSL エフェクトファイルの作成
HLSL アプリケーション側の実装
テキスト描画
Xファイル
Xファイルの読み込みと表示
カメラ制御
ビューとプロジェクションプログラムとソースコード
シェーダプログラミング
ピクセルシェーダ実装例頂点シェーダ実装例
HLSLでシェーダプログラミング
HLSL エフェクトファイルの作成
HLSL アプリケーション側の実装
入力 DirectInput
サウンド DirectShow
ゲームプログラミングの数学
ベクトル
単位ベクトル
ベクトルの外積
ベクトルの内積
2ベクトルのなす角度
2点間の距離
点と線の距離
点と三角形の当たり判定
線上の最近点
2直線の交点
ポリゴンから法線を作る
ポリゴンの表裏の判定
平面と平面方程式の求め方
点と平面の距離
平面上の最近点
平面と線分の交点
単位ベクトル
ベクトルの外積
ベクトルの内積
2ベクトルのなす角度
2点間の距離
点と線の距離
点と三角形の当たり判定
線上の最近点
2直線の交点
ポリゴンから法線を作る
ポリゴンの表裏の判定
平面と平面方程式の求め方
点と平面の距離
平面上の最近点
平面と線分の交点
弾道計算プログラミング
アルゴリズム